





Beproefd en getest, handmatig orderverzamelen
Picking-by-robot is een orderverzamelmethode waarbij goederen door een robot worden verzameld. Bij deze orderverzamelmethode is geen menselijke tussenkomst vereist.
Perceptie gestuurde logistieke robots, of orderverzamelrobots, zijn geavanceerde vormen van autonome systemen die eerder werden gebruikt voor het geautomatiseerd transport van pallets en/of dozen.
Dit type orderverzamelen werd voor het eerst bekendgemaakt in 2015. Magazino presenteerde toen de eerste TORU-robot.
De pick-by-robot methode is volledig geautomatiseerd. Het vereiste aantal artikelen wordt door een orderverzamel robot verzameld. De robot ontvangt de informatie vooraf via een magazijnbeheersysteem (WMS) of via een host (ERP-systeem). Hiervoor is een stabiele Wi-Fi-verbinding nodig.
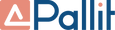
Voorbeeld van de TORU orderverzamel robot van Magazino:
De TORU picking robot nadert het gewenste schap en pakt het relevante item op. Een tray ondersteunt dit proces. De robot heeft een intern geïntegreerd opslaggebied waarop hij de opgepikte items plaatst.
De grijparmen zijn ook uitgerust met 2D- en 3D-camera's om ervoor te zorgen dat de orderverzamelrobot het juiste object pakt, zelfs wanneer er uit een doos met verschillende goederen wordt gepakt.
Overigens: orderverzamelrobots hoeven niet altijd mobiel te zijn. Er zijn ook vast geïnstalleerde robotsystemen die gebruikt kunnen worden om goederen te verzamelen met behulp van transporttechniek.
Volgens de huidige kennis en de huidige stand van de wetenschap is de implementatie van puur robotgestuurd orderverzamelen nauwelijks haalbaar, omdat er veel hindernissen zijn. Hier volgen enkele voorbeelden:
Eén oplossing - aangepast aan de huidige stand van de wetenschap - zou zijn om de activiteiten van mensen te combineren met die van robots. Op deze manier zou elk van hen deeltaken op zich nemen die aan hem zijn aangepast. Deze combinaties worden steeds vaker gebruikt in productie- en assemblageprocessen: collaboratieve robotica. Door gebruik te maken van de sterke punten van mensen en robots kan een optimum worden bereikt dat zeer economisch efficiënt is.
Tussen haakjes: een collaboratieve robot, of kortweg cobot, is een industriële robot die tijdens het productieproces met mensen samenwerkt en niet door beschermingsmiddelen van hen gescheiden is.













